Singapore-MIT Alliance for Research and Technology’s (SMART) Mens, Manus & Machina (M3S) interdisciplinary research group, and National University of Singapore (NUS), alongside collaborators from Massachusetts Institute of Technology (MIT) and Nanyang Technological University (NTU Singapore), have developed an AI control system that enables soft robotic arms to learn a wide repertoire of motions and tasks once, then adjust to new scenarios on the fly without needing retraining or sacrificing functionality. This breakthrough brings soft robotics closer to human-like adaptability for real-world applications, such as in assistive robotics, rehabilitation robots, and wearable or medical soft robots, by making them more intelligent, versatile and safe.
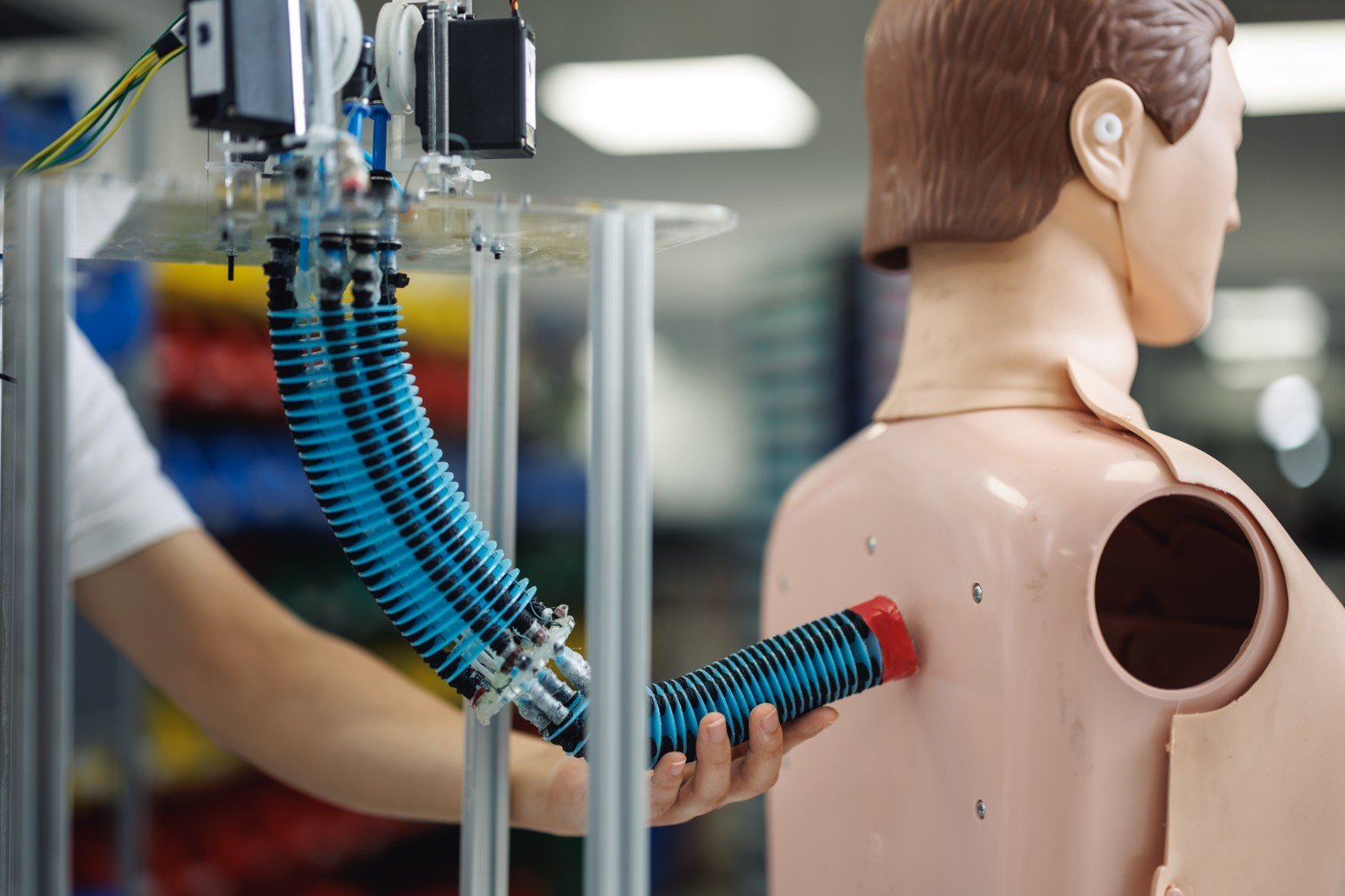
Unlike regular robots that move using rigid motors and joints, soft robots are made from flexible materials such as soft rubber and move using special actuators – components that act like artificial muscles to produce physical motion. While their flexibility makes them ideal for delicate or adaptive tasks, controlling soft robots has always been a challenge because their shape changes in unpredictable ways. Real-world environments are often complicated and full of unexpected disturbances, and even small changes in conditions – like a weight shift, a gust of wind or a minor hardware fault – can throw off their movements.
Despite substantial progress in soft robotics, existing approaches often can only achieve one or two of the three capabilities needed for soft robots to operate intelligently in real-world environments: using what they’ve learned from one task to perform a different task, adapting quickly when the situation changes, and guaranteeing that the robot will stay stable and safe while adapting its movements. This lack of adaptability and reliability has been a major barrier to deploying soft robots in real-world applications until now.
In a study titled ‘A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations’, recently published in Science Advances, the researchers describe how they developed a new AI control system that allows soft robots to adapt across diverse tasks and disturbances. The study takes inspiration from the way the human brain learns and adapts and was built on extensive research in learning-based robotic control, embodied intelligence, soft robotics and meta-learning.
The system uses two complementary sets of “synapses” – connections that adjust how the robot moves – working in tandem. The first set, known as “structural synapses”, is trained offline on a variety of foundational movements, such as bending or extending a soft arm smoothly. These form the robot’s built‑in skills and provide a strong, stable foundation. The second set, called “plastic synapses”, continually updates online as the robot operates, fine-tuning the arm’s behaviour to respond to what is happening in the moment. A built-in stability measure acts like a safeguard, so even as the robot adjusts during online adaptation, its behaviour remains smooth and controlled.
“This new AI control system is one of the first general soft-robot controllers that can achieve all three key aspects needed for soft robots to be used in society and various industries. It can apply what it learned offline across different tasks, adapt instantly to new conditions and remain stable throughout — all within one control framework,” said Associate Professor Zhiqiang Tang, who was a Postdoctoral Associate at M3S and at NUS when he carried out the research, is the first and co-corresponding author of the paper, and is now Associate Professor at Southeast University (SEU China).